一、项目简介
自动导航运输车(AutomatedGuidedVehicle,AGV)是装有自动导航装置,能够沿规定的路径行驶,在车体上具有编程和停车选择装置、安全保护装置以及各种物料移载功能的搬运车辆。广泛应用于汽车制造、电子、纺织、食品、烟草、物流仓储等行业和领域。2016年中国AGV市场销售量7350台,市场规模达12.08亿元,同比增长37.7%。2017年中国市场AGV销量有望突破10200台,同比增速超38%。特别是新一代完全柔性的AGV机器人将在各种场景下得到应用,新的AGV增量市场正在酝酿过程中。
当前AGV主要导航方式为有轨导航(固定路径)和无轨导航(柔性路径)。传统有轨导航AGV主要采用有轨导航方式,虽然简单易行、路径跟踪可靠性好,但灵活性和柔性差;新的激光导航方式,在应用时具有更高的柔性,但目前大多数是采用反射板和三角定位原理进行,其灵活性和柔性受到限制。
无轨导航AGV不需要任何场地施工、具备自由路径导航和智能避让能力的AGV,越来越受到行业的重视,是重要发展趋势和研究热点。这种无轨的自主导航系统(自由路径规划和决策)具有更高的引导柔性,能够更高效、灵活地完成物料的搬运任务。随着车间物流和生产流程日益复杂多变,对柔性供送、自主规划决策的新一代AGV需求迫切。
本项目致力于开发面向柔性物料搬运、内部物流的AGV机器人平台,具有效率高,易于操作、使用灵活且安全等特点。项目研究的这种AGV是第三代柔性移动机器人,综合了激光、视觉、惯性定位和自主规划决策技术,是未来的移动解决方案。(智能化工具化),适应于巡检和商城、宾馆、医院等场所的内部配送。
项目研究全新一代AGV属于自主导航机器人,具备全柔性:无轨导航,不需要场地布设,全软件化,应用更广(内部物流、人机协作等)。具备自主性:自动路径规划、自动避障、自动跟踪、相互协作、自动充电等智能决策。项目研究具有重要的现实意义和市场前景。
二、前期研究基础
研究团队已经开工研究面向柔性物料搬运和物流配送的新一代AGV机器人,服务于需混合导航与自由路径功能的新兴AGV市场,目前研发的这种AGV是第三代高级移动机器人,综合了激光、视觉、惯性导航和自主规划决策与人机交互技术,是未来的移动解决方案(智能化工具化)。累计完成投资150万元,已和厦门万久公司开展省高校产学项合作目(基于视觉与惯性定位的AGV装置研发),设计完成了AGV机器人样机,正进行驱动系统、导航系统、控制系统可靠性与性能指标的测试。
当前正在的研究工作和目标是,进一步完善AGV基本机型设计,实现激光SLAM、里程/IMU惯性定位、自主路径规划与跟踪;对AGV的RGB-D视觉系统进行开发设计,实现视觉引导与目标识别、跟踪、避让;进行终端控制软件开发,形成产品应用解决方案。
已发表的与项目相关的主要论文SCI论文5篇,EI论文20余篇。主要发明专利有:
1.仲训昱,田军,庞聪,彭侠夫,曾建平.基于前倾2D激光雷达移动扫描的路面与障碍检测方法,国家发明专利(受理中)。
2.仲训昱.基于虚拟扫描与测距匹配的AGV激光SLAM方法,国家发明专利
(申请号:201710504910.7,受理中)。
3.仲训昱,李跃亮,彭侠夫.面向智能车自主充电的柔性对接装置.国家发明专利(申请号:201710389598.1,受理中)。
4.仲训昱,王祥,陈映冰,彭侠夫.基于A*提取引导点的AGV路径跟踪与避障协调方法.国家发明专利(申请号:201710043581.0,受理中)。
5.仲训昱,李跃亮,刘嘉伟,彭侠夫.一种面向智能车自主充电的柔性对接装置.国家实用新型专利,专利号:201720606992.1。
三、应用技术成果
(一)导航控制系统设计
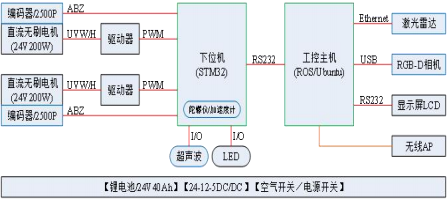
研究团队开发了一种全柔性自主式AGV机器人,其导航控制系统如下图所示,特点有:
1)采用这种模块化的系统平台,搭建激光导航AGV产品,可实现降低制作成本30%-50%;
2)结合视觉/惯性定位和特殊运动机构,支持各种场景下的使用、简易且节省人工成本。

开发的AGV导航控制系统
(二)地图表示和基于A*提取关键路径点的全局路径规划方法
以AGV半径障碍进行膨胀,建立初始栅格地图;通过风险评估函数对障碍周围节点的风险等级进行评估,获得带有风险区域的安全栅格地图。在安全地图上通过A*算法规划全局路径,在得到的全局路径上提取关键路径点。
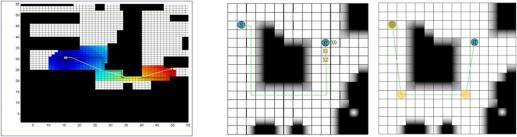
(三)基于位-姿交替控制的路径跟踪与避让/运动协调方法
研究了局部环境建模与自适应窗口的实时避障方法,同时还研究了基于复合速度障碍法的分布式运动规划算法,在各种移动服务机器人与AGV搬运机器人相互协调避让的运动规划中等具有很好的应用前景。
机器人以关键路径点为引导点并不断实时切换、更新引导点,进行路径跟踪与障碍避让的协调统一。

(四)基于地图匹配的AGV激光SLAM方法
虚拟扫描与测距匹配法:增量式创建栅格地图,采用虚拟激光雷达扫描与基于测距的快速轮廓匹配。
LATTICESLAM方法:综合采用了高斯牛顿迭代法、地图匹配表、概率地图和高低两层地图等策略。

(五)AGV系统特色设计
1)双层控制器系统结构,提高可靠性、实时性和灵活性。
2)基于ROS的软件设计,采用NVIDIA的TK1超级计算平台作为主控计算机。
3)下位机功能模块设计:处理实时性较高的任务,如里程计/IMU推算定位、安全速度控制、超声波/防撞条避碰处理等。
4)运动机构及外观设计:两轮差动驱动+两轮随动”的四轮运动机构,比六轮机构具有更好的地面适应性;采用橡胶轮,减震和静音效果好。
5)自动充电对接装置设计:通过柔性连杆的弯曲形变来实现充电接口和充电接头的柔顺对接。